정교한 오리지널 핸드 설계, 국내 첫 사례
산업·연구 현장 위한 휴머노이드 플랫폼 전면 부상
국내 휴머노이드 시장이 진화를 거듭하며 새로운 경쟁 국면에 접어들고 있다. 특히 ‘손’을 갖춘 상반신 휴머노이드가 등장하며, ‘움직이는 팔’ 중심의 로봇 시장은 정밀 제스처와 조작이 가능한 로봇 손 중심으로 방향을 전환하고 있다. 이 중심에 위로보틱스의 차세대 세미 휴머노이드 ‘알렉스(Allex)’가 있다.

정밀 손가락 5개 탑재… 국내 첫 ‘완전 자체 설계’ 세미 휴머노이드
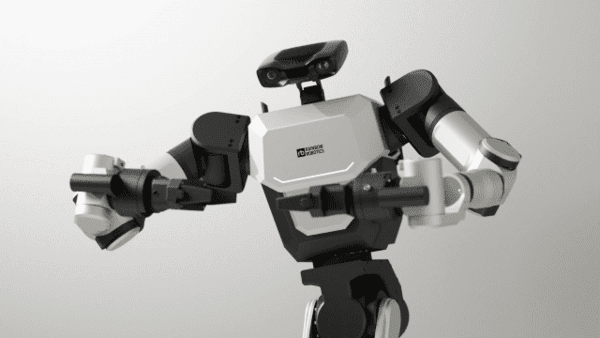
알렉스는 8월 18일 위로보틱스 공식 유튜브 채널을 통해 공개됐다. 사람의 상반신을 본뜬 구조에, 다섯 손가락이 각각 정밀하게 움직이는 독립 제어형 로봇 손이 핵심이다.
단순히 ‘손이 달린’ 수준을 넘어, 팔짱을 끼거나 하트를 만드는 등 섬세한 동작까지 구현한다. 단순 산업용 암(Arm) 수준을 넘어 인간-로봇 상호작용을 위한 상징적 진화라 할 수 있다.
주목할 점은 로봇 본체와 손 모두 위로보틱스가 자체 설계했다는 것이다. 이는 국내에서 최초이며, 중국산 손 모듈을 외장 장식처럼 부착하는 기존 방식과는 본질적으로 다르다. 손가락마다 복수의 소형 액추에이터가 들어가고, 이를 정밀 제어할 수 있는 제어 알고리즘을 구현하는 데 성공했다는 점에서 기술적 의미가 크다.
기존 세미 휴머노이드 한계 뛰어넘다… 실사용성 ‘시험대’ 올라
기존 국내 세미 휴머노이드 로봇은 ‘양팔만 있는’ 로봇 형태에 그쳤다. 예를 들어 레인보우로보틱스의 RB-Y1이나 로보티즈의 AI워커는 양팔을 갖췄지만, 손은 없는 상태로 출하됐다. 이에 비해 알렉스는 ‘손’을 탑재하면서도 상체 일체형 통합 설계를 구현해, 본격적인 연구·산업용 플랫폼으로서 차별화될 가능성이 크다.
알렉스의 손은 학습 기반 제스처 제어, 정밀 조작, 감성형 응답 시나리오 등 다양한 애플리케이션 확장이 가능하다. 하지만 실제 성능과 신뢰성, 내구성 확보는 앞으로의 관건이다. 현재로선 실사용 환경에서 안정성과 일관성을 입증하는 것이 시장 확산의 첫 과제가 될 것으로 보인다.
세미 휴머노이드, K-로봇의 ‘현실적 해법’으로 부상
전체 인체형 로봇을 구현하는 전신 휴머노이드 시장은 미국 테슬라의 옵티머스, 피규어AI, 중국 유니트리 등 글로벌 빅플레이어들이 주도하고 있다.
이에 비해 한국은 상체 중심의 세미 휴머노이드 기술에서 실용성과 특화 경쟁력을 키우고 있다. 알렉스 역시 이 전략에 부합한다. 다리를 제외하고 가격과 안정성을 확보한 플랫폼 설계는 빠른 시장 진입을 가능하게 하며, 연구소·제조현장·서비스 산업 전반에 활용 폭을 넓힐 수 있다.
이미 레인보우로보틱스 RB-Y1은 MIT, UC버클리, 스탠포드 등 미국 명문대와 삼성전자 등 국내 기업에 납품됐고, 로보티즈 AI워커는 VR 기반 제어 및 자가학습 기능을 강화한 버전을 선보이며 확산 속도를 높이고 있다.
‘작지만 강한 손’으로 승부수… K-로봇, 인간다움 향해 한 발 더
위로보틱스의 알렉스는 한국 로봇 업계가 ‘인간다움’을 구현하는 새로운 단계로 접어들었음을 알리는 신호탄이다. 아직 완전한 전신형을 실용화하기엔 시간이 더 걸리겠지만, 두 손이 만들어낸 변화는 상호작용의 질을 높이고 응용 가능성을 크게 확장시키는 계기가 될 전망이다.
신주백 기자 jbshin@kmjournal.net
- 세계 첫 ‘대리 임신 로봇’ 1년 내 탄생?
- 500대 로봇, 인간처럼 달리고 싸운다…中 ‘세계 휴머노이드 로봇 운동회’ 개최
- 빨래도 개는 휴머노이드 로봇 등장…‘피규어AI’ 헬릭스로 진화한 가정용 AI 로봇
- 테슬라, 로보택시·옵티머스로 ‘새벽 택배 배송’ 가능성…무인 물류 실험 부상
- “3년 안에 로봇 산업, 세상을 뒤흔드는 순간 온다”
- 베이징에 등장한 ‘로봇 편의점’…직원 없이 24시간 영업
- [테크 칼럼] 월드모델·피지컬 AI·XR, 따로인 듯 함께 간다
- 머스크 “로봇 손이 가장 어려워”…옵티머스 개발, 하드웨어 난제 봉착
- [분석리즘] "진짜 사람 손처럼 쥐고 비켜준다"…위로보틱스, 휴머노이드 손가락 기술로 글로벌 승부수
- 오픈AI, 휴머노이드 제어 AI 전담팀 재가동…휴머노이드 개발 본격화
- CJ대한통운, 로보티즈와 함께 AI 휴머노이드 로봇 실전 투입… 물류 현장서 첫 실증
- “두개골 부술 힘 가진 로봇”… 피규어AI, 안전 경고한 직원 해고 의혹으로 피소
![[동학] 카카오톡 친구탭, 결국 12월 롤백… “격자형 피드는 선택 옵션으로”](https://cdn.kmjournal.net/news/thumbnail/custom/20251126/5517_10550_1119_1763853080_120.jpg)


![[테크 칼럼] 제미나이3, GPT-5.1을 넘다…AI는 이제 ‘일을 대신하는 시대’로 간다](https://cdn.kmjournal.net/news/thumbnail/custom/20251126/5457_10454_4847_1763621329_120.jpg)





